|
This year, the students went to the regional competition. However, we still had time leftover until the end of the year. We decided that a slightly modified version of the 2015 Half Time would be a great game for a shorter season. Our modification was very simple: instead of having to depress a lever to allow balls to fall out of the dispenser, we took off the springs and start off with the PVC stand supporting the ball dispensers. The teams get points for knocking it over during autonomous, then collect the balls off the ground. This is really great because it makes it significantly easier, and it allows them to practice a traditional shortcoming: ball collection from the ground. This year, we had our competition on May 28th. We had 5 judges, mostly the same from last year. Our two teams this year were Freedom Fries, captained by Trevor H., and The "A" Team, captained by Kelsey M. Our time frame was somewhat shorter than last year - 10 weeks vs about 12. One other change we made was that the last seven days before the competition, the students couldn't use power tools or saws. This was an attempt to minimize last-minute changes to the robot. Joey and I also had a special treat for the audience - we built robots specifically for the audience to drive around and play with. Last year, it was very awkward having the parents simply staring at us the entire time. The robots that we built were able to compete, but we used RC control rather than NXT. This allowed the students to utilize everything we had available. Overall, this competition was much more successful. Hopefully, next year we can create a completely different competition. Also, I hope we can use the new hardware, instead of going back to the NXTs. The final score from this year was Freedom Fries at 115 points and The "A" Team had 205. Freedom Fries won the Judges' Award for a better interview and more thought-out engineering process. And now for some pictures! 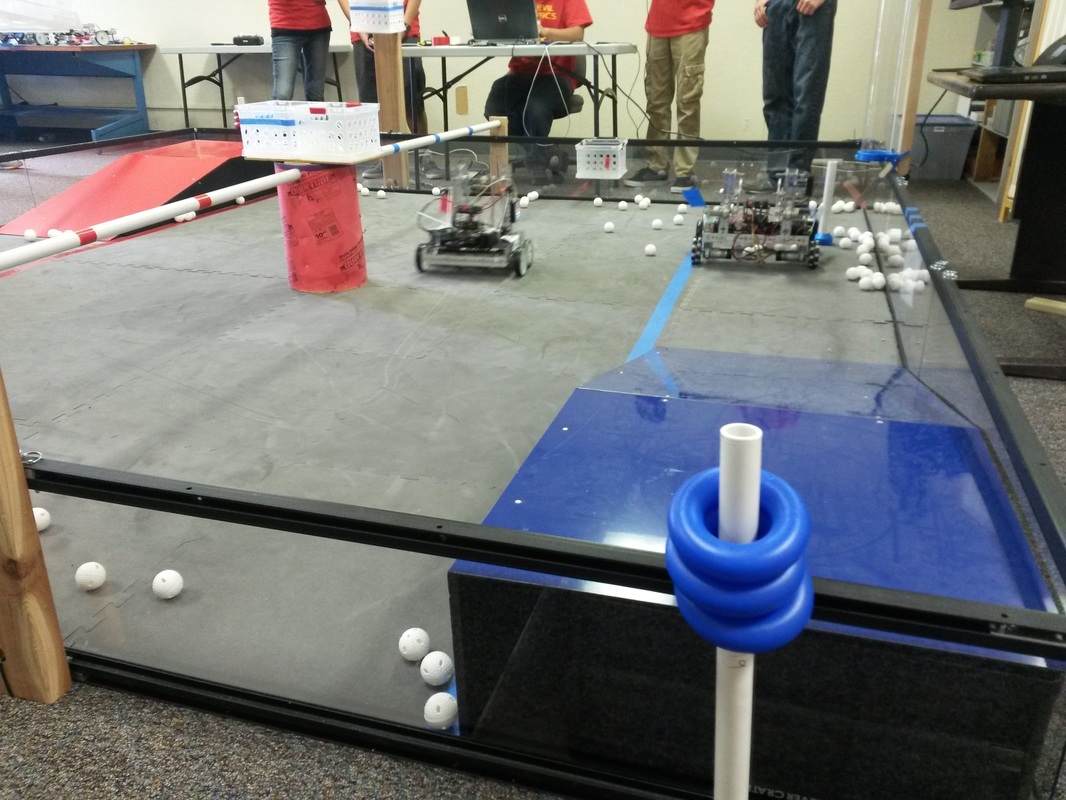 An action shot from one of the early rounds. The robot on the left is Freedom Fries, the one on the right is The "A" Team.  John H. is watching Lucas M., and Joey C. play with the two audience robots between matches. The audience robots served two purposes - it gave audience members a way to be engaged and participate, and it allowed the mentors to show the students another way to do ball collection. Namely, it allowed us to show them how to use a servo to drive balls in and out of a shovel.  A later action shot. Blurry means exciting movement, right? The robot on the left is The "A" Team, and the one on the right is Freedom Fries.
0 Comments
Today was our final meeting for the school year. In an attempt to clean up the rooms a bit, the students won't be meeting over the summer but the mentors will. Our goal is to clear out the ewaste and create a new storage system for all of our raw materials. Over the past few weeks, our meeting times have been spent running more rounds of Half Time. The student robots have changed significantly from the competition. XD is doing a lot of scoring, and the time spent driving is really helping their accuracy. EZ$ is spending most of their time trying to get their collection mechanism to work. Lessons learned from this year:
Overall, I think this has been an excellent experience for the students, and a good use of time for our post-competition months. I think we'll probably do something similar in future years.
Competition day has finally arrived! Each team has been working very hard to get finished robots ready for today, complete with programming and driver practice. We've invited some adults with engineering backgrounds to come be a judging panel and interview the teams. We've brought in some people Joey and I know from other projects. The judges included electrical engineers, a STEM librarian, and a technology librarian. The job of these judges is to ask questions about the designing and the building processes, then determine which team used a better process. After the judges deliberate, they award the winning team the Judges Award. People arrived at the rooms around 10. The students assembled into their teams and took their robots and Engineering Notebooks into a quiet room to be interviewed. We, the mentors and adults that they know, tried not to be in the rooms. We decided that made a better environment for interviewing. We did listen in on the deliberations, though. The judges talked over the presentations, but ultimately made their decision based on the Engineering Notebook. After the Judges Interviews, the students asked for a delay in the start of the competition. We decided to give them an hour to finish their robots. A lot of parents came and enjoyed touring the rooms and seeing what their children have accomplished with the club. For the matches, we used the NXT bricks and Samantha modules, which connect to the Field Control System on a laptop via wifi. Next year, the control hardware will be changing to two cell phones that use wifi direct, but since we don't have any of the new hardware we're using the old system. Unfortunately, the older system still had all of its old issues with connecting and staying connected, We had a lot of that today... Once the students finished their modifications to the robots, we started the rounds! They were very exciting, each with interesting failures. In one round, the autonomous program for one of the teams caused the robot to turn and roll straight off the ramp. In another, the students placed a robot backwards and the autonomous program ran it into the outer wall for the full 30 seconds.
The teams have split and have begun working on their designs. We are trying to enforce design first, build second, since that's where the official season seemed to have its breakdown. The two teams have decided on their names: Team XD and Team EZ$ (pronounced "easy money"). I really don't know where they got them, but it makes them happy. They also have captains now. Greg Y. is the captain for Team XD, and Anthony V. is the captain for Team EZ$. Competition Day has been scheduled for April 25th, a Saturday that gives them a slightly accelerated build schedule. We're inviting parents and making a day of it, like any normal meet would be. The hope is that that makes it more real for the students and motivates them to work more. We plan on using the scoring document spreadsheet on competition day for ease of scoring.
Setup of the Playing Field: The field is split in half by a PVC pipe, which hangs at 14” above the ground. Each side of the field is a mirror of the other. There is a ramp inside of a keep-out zone. Also inside the keep-out zone is a ball dispenser. The ball dispenser has a plate on the bottom, which is held up by a piece of PVC pipe, and is activated by the robot hitting the pipe out of the way, releasing the balls from the tube. Near the ball dispenser is the goal for the opposing team, with its opening at 12”. In the center of the field, of the same half of the field, is the goal for the opposing team at 24”. Directly opposite the 12” goal, still on the same half of the playing field, is the goal of the opposing team at 36”. There is also a ring dispenser located at the top of the ramps. Heights of the Goals: Openings are at 12” (worth 5 points per ball), 24” (worth 10 points per ball), and 36” (worth 15 points per ball). 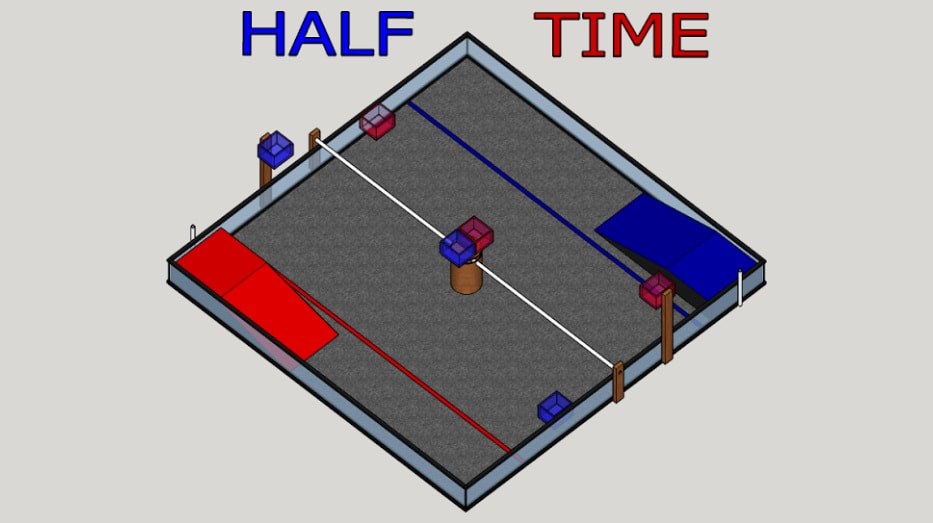 Stages of the Game: There are three periods within the game. Each has specific rules. Autonomous Period: 30 seconds. Robots are controlled by pre-programmed instructions. They may earn points by:
Points Table: 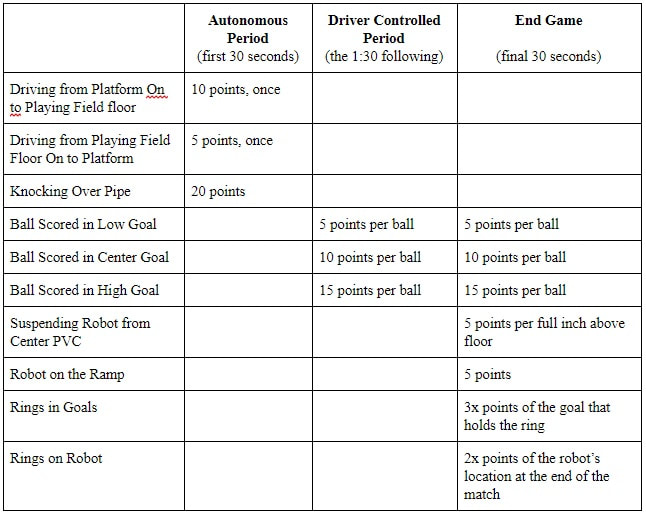
The students did not qualify during the regular FIRST Tech Challenge (FTC) matches for this year, so Joey and I have decided to create a competition for them. The purpose of this competition is to allow them to work in smaller groups (so more people can get hands on with the robot) and to give them a second chance to build and compete. Today was kickoff for the teams. Joey and I did a presentation for the students in the style of the FTC kickoff video. We let them ask questions, then distributed the "Game Manual" for our game. The students elected two Team Captains, Greg and Anthony, who then chose their teams.
We've chosen to call our game "Half Time" because
For nearly all of the game elements for this game, we plan to use old game elements that the club has previously purchased. This includes:
|
This is meant to be read like a build log - start from the oldest and work to the newest.
Archives
May 2016
Categories |
||||||||||||||||
 RSS Feed
RSS Feed
